Качающиеся транспортеры
Назначение,
принцип действия и применение
Качающиеся конвейеры — транспортирующие устройства без
специального тягового органа, их схемы показаны на рисунке 73, а, г и д.
Транспортирование груза совершается последовательно повторяющимися
перемещениями или скачками груза по грузонеcущему органу.
В зависимости от характера и режима движения различают
конвейеры:
инерционные с постоянным или
изменяющимся давлением груза на дно, в которых груз перемещается, не отрываясь
от дна желоба, скольжением;
вибрационные, в которых
перемещение совершается микробросками с отрывом частиц груза от дна желоба.
В сельскохозяйственном производстве качающиеся
конвейеры пока не получили надлежащего распространения. Опыт применения мал и
относится главным образом к сельскохозяйственным машинам. Качающиеся конвейеры
могут найти более широкое применение с экономическим эффектом: снижение
удельных энергоемкости и металлоемкости, габаритов машин и установок, уменьшение
строительной высоты зданий — кормоцехов, зерноочистительных токов и т. п.
Особый интерес представляют вибропитатели, могущие
транспортировать груз равномерным непрерывным потоком или порциями.
К недостаткам качающихся конвейеров относятся:
повышенный износ желоба при транспортировании абразивных грузов; трудность
перемещения липких грузов; передача вибрационных нагрузок на конструкции
установок и машин и шум. Применяемые инерционные и вибрационные транспортеры
для элеваторов и складов имеют производительность
5... 140 т/ч, длину транспортирования 2,6...50 м,
размер желоба или трубы 0,15...1,0 м, мощность 0,6... 14,0 кВт, амплитуду
0,2... 12 мм и частоту колебаний 500...6000 1/с.
Инерционные
конвейеры с жестким приводом
Привод конвейера осуществляют в виде простого
шатунно-кривошипного (см. рис. 73, а) механизма или двухкривошипным качателем и
др.
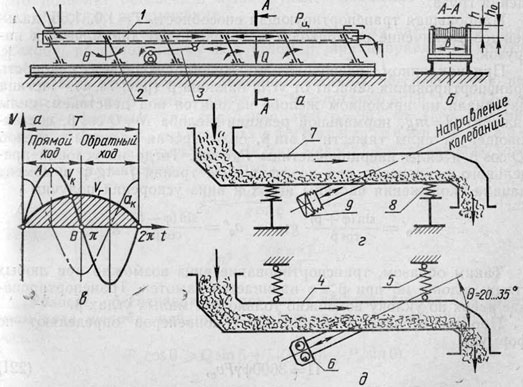
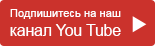
Рис. 73.
Схемы качающихся конвейеров: а —
инерционного с переменным давлением груза на дно желоба; б —
поперечное сечение желоба; в — диаграмма скоростей и ускорений; г —
вибрационный опорный; д — вибрационный подвесной с двухмассовым приводом; 1, 4 и 7 —
грузонесущие желоба; 2, 5 и 5 - опорные подвесные
устройства; 3, 6 и
9 — возбудители колебательного движения.
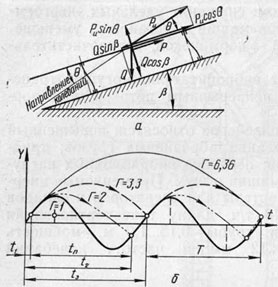
Рис. 74. К расчету
виброконвейеров: а — схема действия сил; б — траектории движения
элементов груза.
Конвейер с постоянным давлением на дно желоба совершает
плоские колебательные движения. На материальную частицу действуют силы Q = mg; F = fmg и Ри = та.
Частица переместится по желобу при условии Ри ≥ F. Перемещение возможно по ходу движения материала и против
него. Но путь скольжения вперед по ходу s1 больше,
чем против хода s2.
Тогда транспортирующая способность конвейера
Т = (s1 – s2)/s, (220)
где s — ход желоба; очевидно; большие значения Т обеспечивают при принятом ходе желоба более высокую
скорость перемещения груза.
Наибольшая транспортирующая способность T =
1,0...1,65, дальнейшее увеличение ее приводит к возрастанию динамических нагрузок.
При наклонном расположении желоба конвейера скорость
транспортирования зависит от угла наклона в (рис. 74, а). Частица материала на наклонном желобе находится
под действием: силы тяжести Q = mg, нормальной реакции желоба
N = Q cosв, составляющей от силы тяжести Q sinв, силы
трения частицы о желоб fQ cosв и силы
инерции частицы
Ри = та.
Тогда из условий предельного равновесия при коэффициенте трения f = tgц в момент начала скольжения частицы вверх и вниз ускорения
получим
![]()
Таким образом, транспортирование вниз возможно при
любых: углах уклона, но при в > ц начинается самотек. Транспортирование
вверх по уклону возможно только при малых углах в.
Производительность инерционных конвейеров определяют пo формуле
П = 3600шгFхс (221)
где ш = 0,5...0,8 — коэффициент наполнения желоба или трубы; F — площадь желоба (ВЧАh0) при h0 = (0,4...0,6)В
или трубы 0,785 D2;
хc ≤ (0,15...0,45) м/с — средняя скорость транспортирования
определяемая по диаграмме (см. рис. 73, в), или хc = Sn/60 или n = 40...85 об/мин (частота вращения кривошипа)
;
S — путь, проходимый грузом за один оборот вала.
Приближенно мощность можно определить по формуле
N ≈ 0,014g(Gг + Gк) (222)
где Gк — суммарная масса
движущихся частей конвейера;
Gг — масса
движущегося груза.
Главное отличие конвейера с переменным давлением на дно
желоба (см. рис. 73, а) заключается в опоре или подвешивании желоба на упругих
элементах, закрепленных в раме под углом И = 20...30є к вертикали. Под
действием шатунно-кривошипного механизма желоб совершает колебательные
движения. Упругие стойки изготовляют из стали или дерева.
О правильном выборе кинематического и динамического
режимов работы можно судить на основе построения диаграммы скоростей желоба и
груза — хж и хг ускорения
желоба аж (см. рис. 73, в). При проектировании следует
соблюдать условия: груз не должен отрываться от желоба; при обратном ходе
желоба груз под действием силы инерции должен продолжать двигаться вперед. Это
позволит обеспечить пульсирующее движение груза вперед, без обратного
перемещения.
Рассмотрим условия равновесия и движения частицы груза
по желобу, расположенному под углом в, при направлении колебаний под углом И к
плоскости желоба (рис. 74, а).
Условие безотрывного движения частицы
обеспечивается при Ри sin И ≤ Q cos в или, заменяя Ри = та sin б sin
И и
Q = mg (где б — фазовый угол
колебания; при б = 90°, а = Ащ2), получим Ащ2 sin И ≤ g cos в, откуда коэффициент
режима работы —
отношение нормальных (к дну желоба) составляющих ускорений от сил инерции и
тяжести:
![]()
Тогда
![]()
Условие, обеспечивающее движение частицы вперед при обратном ходе желоба, найдем из уравнения суммы проекций сил на ось X: РиcosИ ≥ Q sin в +f (Qcosв + sin И), после преобразований получим
![]()
Производительность определяют по
формуле (221), учитывая
влияние угла подъема в ≤ 10...15°. Снижение
производительности может достигать 3% на каждый градус подъема. Высоту слоя груза h принимают равной 50...100
мм и И = 20°.
Вибрационные
конвейеры
Вибрационные конвейеры отличаются от инерционных
режимом работы, который характеризуется коэффициентом режима работы Г, определяемым по формуле (223). Для вибрационных конвейеров
всегда Г >1. Это значит, что нормальная составляющая от силы инерции больше
нормальной составляющей силы тяжести и частицы в процессе транспортирования
отрываются от дна желоба, совершая скачки. Вибрационные конвейеры обладают
повышенной частотой колебаний n = 400...6000 1/мин и
сравнительна малыми амплитудами А = 15...0,2 мм.
В зависимости от упругих систем подвески конвейеры (см.
рис. 73, г и д)
делят на:
резонансные — в установках
среднего и тяжелого типов; у них частота колебаний возмущающей силы п
и собственных колебаний По близки или равны. Устойчивая работа обеспечивается
при 0,85 < n/n0 <1,25;
дорезонансные, которым
соответствует n < n0,
практически мало распространены;
зарезонансные — имеют n >
n0, их
применяют в подвесных конвейерах легкого типа. При пуске и остановке конвейера
упругие элементы испытывают кратковременно большие напряжения.
По принципиальной схеме устройства вибрационные
конвейеры бывают:
горизонтальные и пологонаклонные с
углом подъема до 15° и вертикальные, имеющие
спиралеобразный желоб;
по форме поперечного сечения грузонесущего органа — трубчатые (круглые, квадратные и прямоугольные) и желобчатые (прямоугольные, трапециевидные и полукруглые);
по динамической характеристике — неуравновешенные и уравновешенные;
по количеству колеблющихся масс —п
= Г — времени периода и при Г = 6,36 tп = 2T,
т. е. частица будет встречаться с дном желоба через
одно колебание, что приводит к большим ускорениям и соответственно динамическим
нагрузкам. Наибольший эффект транспортирования теоретически должен соответствовать,
когда время полета частицы tп = T, времени одного периода.
Следовательно, коэффициент режима работы необходимо выбирать в пределах 1 < Г
< 3,3.
На основе опыта эксплуатации рекомендуется: при Г =
1,2...3,3 и частоте колебаний в минуту n = 450...3000 A
= 0,2...8,0 — для зернистых и кусковых грузов и A = 0,5... 15,0 — для пылевидных и порошкообразных.
Амплитуда и частота колебаний
определяют динамику работы конвейера, его производительность, скорость транспортирования
и связаны зависимостью через коэффициент режима работы выражением из формулы
(224):
При одном и том же значении Г
увеличение амплитуды дает больший эффект в повышении скорости
транспортирования, чем увеличение частоты колебаний.
Кроме указанного с допущением
где m = Q0:g — масса дебалансов
привода вибратора;
r0
— эксцентриситет массы дебалансов.
Общая масса нагруженного конвейера будет равна
M
= лGгт + Gп
где Gг, Gт и Gп —
соответственно массы транспортируемого груза, желоба и вибратора;
л
= 0,6...0,07 — коэффициент учета массы.
Скорость транспортирования хс
— параметр, определяющий производительность конвейера, формула (221), зависит
от физико-механических свойств груза и конструктивных параметров конвейера.
Основы теории и расчета
Вопросы проектирования вибрационных конвейеров можно решать, только сочетая расчетные рекомендации с опытными исследованиями и практикой. Процесс перемещения груза вибрационным конвейером сопровождается сложными явлениями в зависимости от специфических особенностей груза, его физико-механических свойств и влияния сопротивления воздуха. При скачкообразном движении в трубах под грузом и над ним создаются зоны разрежения и повышенного давления, особенно при транспортировании пылевидных грузов. Траектории движения частиц показаны на рисунке 74, б. Исследованиями установлено, что перемещение с подбрасыванием частиц материала описывается зависимостью (225) где р — любое целое число. Принимая р = 0, 1, 2 и т. д., получим для коэффициента режима работы Г соответственно 1; 3,3; 6,36 и т. д. При Г=1 частица находится во взвешенном состоянии; если Г = 3,3, время полета t![]()
Рис. 75. Зависимости
производительности от амплитуды (а)
и угла наклона лотка (б).
Увеличение ширины желоба В = 50...200 мм ведет к незначительному (от 4 до 20%) возрастанию скорости. Изменение амплитуды А = 0,75...1,7 мм приводит к линейному нарастанию скорости хс = 0,125...0,4 м/с. Это еще раз подтверждает эффективность увеличения амплитуды колебаний. Приближенно определяют скорость хс по эмпирической зависимости хс = з0хж где з0 = 0,3...0,62 — коэффициент проскальзывания; большие значения — для крупнокусковых и зернистых грузов; хж = щА — скорость желоба. Более точно скорость можно определить по Бауману В. А. и Дьячкову В. К. с учетом параметров режима работы и конструктивных размеров:
![]()
где k1
= 0,2...1,1 и k2=
1,5...5 — коэффициенты, зависящие от физико-механических свойств груза; меньшие
значения принимают для пылевидных и большие — для кусковых и связных грузов.
Производительность
виброконвейера является сложной функцией ряда параметров: амплитуды и частоты
колебаний, геометрических размеров желоба, физико-механических свойств транспортируемого
груза.
* Знак минус в скобках принимается для конвейеров,
работающих с подъемом груза.
На рисунке 75, а показана зависимость П = f(A, h), т. е. производительности
от амплитуды колебаний и толщины транспортируемого слоя. С увеличением А и h производительность
повышается, но темп нарастания П по Л замедляется.
Для легкосыпучих материалов вполне допустимо принимать h:
В = 0,3...0,8 и выше. При узких желобах темп нарастания производительности
меньший: сказывается влияние эффекта пристенного торможения.
Отклонения скоростей хmax и хmin у стенок от хc потока незначительны и колеблются в пределах 3...5%.
Производительность от площади потока hЧB имеет линейную
зависимость, что согласуется с логической формулой (221).
Возможность транспортировать груз под углом с подъемом
ограничивается в <15° (рис. 75,6). Транспортирование под уклон повышает
производительность.
При определении производительности по формуле (221)
коэффициент наполнения принимают ш = 0,6...0,9, большее для желобов.
Ширину желоба и диаметр трубы по производительности
можно определить по формулам
![]()
Высоту слоя материала h принимают (0,25...0,8) В. Устройство и расчет приводов Приводы конвейеров (вибровозбудители) бывают электромагнитные (рис. 76, а), электромеханические (рис. 76,б и в) и гидравлические. Электромагнитные вибраторы бывают однотактные и двухтактные при производительности до 40 м3/ч, n = 3000 1/мин; A = 0,25...0,8 мм — амплитуда колебаний, масса вибратора 4,5... 200 кг и мощность 0,11...3,3 кВт. Электромеханические приводы бывают центробежные и эксцентриковые (шарнирно-кривошипные). Центробежные приводы разделяются на дебалансные с маятниковым креплением (рис. 76, б) и самобалансные (рис. 76, в) направленного действия. При вращении неуравновешенного груза 1 создается центробежная сила Ри с направлением действия, определяемым фазовым углом б положения груза. Максимальное значение возмущающей силы При любом другом положении груза сила Ру меньше максимального значения, а составляющая Рх в дебалансном приводе воспринимается упруго-шарнирным устройством и не передается на желоб, а в самобалансном приводе взаимно уравновешивается.

Кинетический момент дебалансного привода равен Mк = gmr. (228) Максимальная возмущающая сила, действующая под углом в самобалансном приводе равна 2Ру = 2Ри = 2mrщ2, где т — масса дебаланса; r —эксцентриситет массы дебаланса; щ - угловая скорость вращения груза. Эксцентриковые (шатунно-кривошипные) приводы (рис. 76, г) бывают с жестким и упругим шатунами, снабженными пружинамв или резинометаллическими пакетами заданной жесткости. Конструкция центробежных и эксцентриковых приводов в части дебаланса и эксцентрика разнообразна. Двухэксцентриковая конструкция СИМСХ состоит из вала и жестко укрепленного на нем эксцентрика диаметром D1 (рис. 76,д). Внешний эксцентрик диаметром D может поворачиваться и закрепляться относительна внутреннего, занимая положение 1, 2, 3 и т. д., создавая различные эксцентриситеты массы дебаланса относительно центра вращения О ех = 0...2е1. Его определяют:
![]()
Пользуясь выражениями для силы инерции Ри, кинетического момента Мк и массы груза при z — числе грузов и m = 0,785zD2Bг, получим
![]()
Выбор размеров В и D согласуют с оптимальным вариантом конструктивного оформления.